
In a new report from Nature, research from evolutionary roboticist, Josh Bongard, at the University of Vermont in Burlington demonstrates a self-correcting hexapod.
From the article:
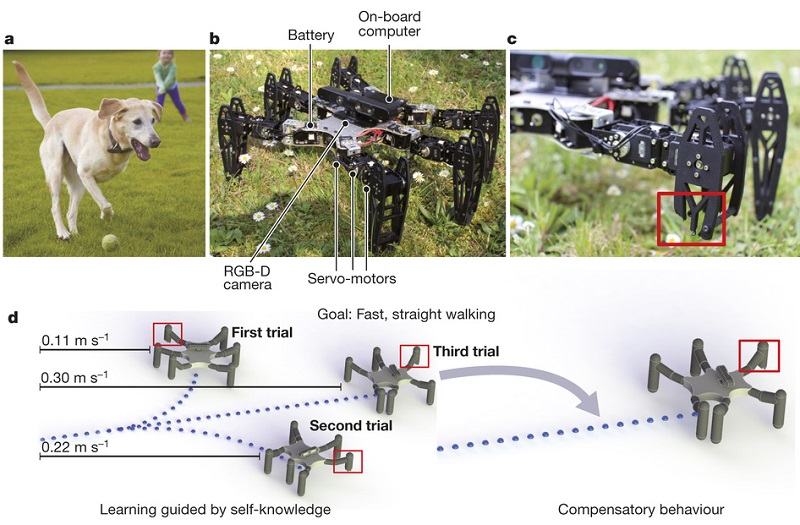
“After a fault, such as the loss of one of its feet or a stuck knee, the robot uses its on-board camera to detect that something is slowing it down or preventing it from walking straight. Rather than attempting to diagnose the problem, the robot simply tries out new patterns of motion until it finds one that enables it to restore an acceptable level of performance.”
Robots working in disaster areas may become injured and having this ability to quickly self-correct walking patterns can be crucial for success of a mission. Of course, the robot is not really learning with evolutionary algorithms or through techniques like deep learning. Instead, the robot is pre-programmed to with around 13,000 walking patterns that the robot can quickly cycle through in the event of injury.
The programming also helps the robot with unusual terrains in which a new walking pattern may be more efficient. This will help walking robots become more autonomous in natural terrains.
-RSB